篇首语:本文由编程笔记#小编为大家整理,主要介绍了MOT综述 (2021)相关的知识,希望对你有一定的参考价值。
@TOC

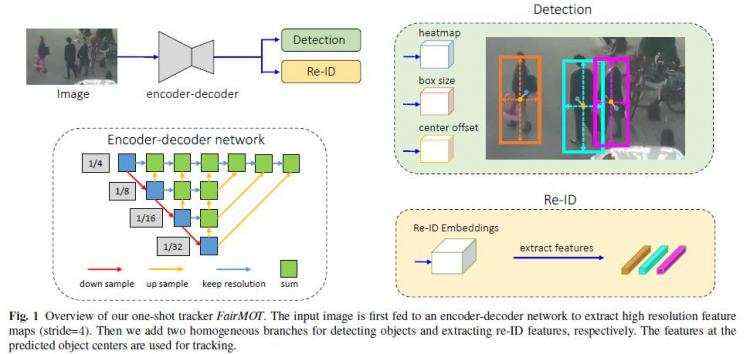
此热图头负责估计对象中心的位置
如果热图中某个位置的响应与真实对象中心重合,则该位置的响应预计为 1
响应随着热图位置和对象中心之间的距离呈指数衰减
对于图像中的真实Box的位置:
b
i
=
(
x
1
i
,
y
1
i
,
x
2
i
,
y
2
i
)
b^i = (x_1^i, y_1^i, x_2^i, y_2^i)
bi=(x1i,y1i,x2i,y2i)
则对象的中心为:
(
c
x
i
,
c
y
i
)
=
(
x
1
i
+
x
2
i
2
,
y
1
i
+
y
2
i
2
)
(c_x^i, c_y^i) = (\\fracx_1^i + x_2^i2, \\fracy_1^i + y_2^i2 )
(cxi,cyi)=(2x1i+x2i,2y1i+y2i)
对象中心在特征图中的坐标为:
(
c
~
x
i
,
c
~
y
i
)
=
(
⌊
c
x
i
4
⌋
,
⌊
c
y
i
4
⌋
)
(\\widetilde c_x^i, \\widetilde c_y^i) = (\\lfloor \\fracc_x^i4 \\rfloor, \\lfloor \\fracc_y^i4 \\rfloor)
(c
xi,c
yi)=(⌊4cxi⌋,⌊4cyi⌋)
热图在位置
(
x
,
y
)
(x,y)
(x,y)处的响应为:
M
x
y
=
∑
i
=
1
N
e
x
p
−
(
x
−
c
~
x
i
)
2
+
(
y
−
c
~
y
i
)
2
2
σ
c
2
M_xy = \\sum_i=1^N exp^-\\frac(x - \\widetilde c_x^i)^2 + (y - \\widetilde c_y^i)^22 \\sigma_c^2
Mxy=i=1∑Nexp−2σc2(x−c
xi)2+(y−c
yi)2
热图的损失函数:定义为具有焦点损失(focal loss)的像素级逻辑回归
L
h
e
a
t
=
−
1
N
∑
x
y
(
1
−
M
^
x
y
)
α
l
o
g
(
M
^
x
y
)
,
if
M
x
y
=
1
(
1
−
M
x
y
)
β
(
M
^
x
y
)
α
l
o
g
(
1
−
M
^
x
y
)
,
otherwise
(
1
)
L_heat = - \\frac1N \\sum_xy \\begincases (1 - \\hat M_xy)^\\alpha log (\\hat M_xy), & \\textif $M_xy=1$ \\\\ (1 - M_xy)^\\beta(\\hat M_xy)^\\alpha log (1- \\hat M_xy), & \\textotherwise \\endcases \\quad (1)
Lheat=−N1xy∑(1−M^xy)αlog(M^xy),(1−Mxy)β(M^xy)αlog(1−M^xy),if Mxy=1 otherwise(1)



 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有 
